Please note that using MATLAB version 2025a or later may cause problems with the display and functionality of the GUI. We recommend using older versions only until the issues can be resolved.
¶ Reference
Johannes Böhm, Sigrid Böhm, Janina Boisits, Anastasiia Girdiuk, Jakob Gruber, Andreas Hellerschmied, Hana Krásná, Daniel Landskron, Matthias Madzak, David Mayer, Jamie McCallum, Lucia McCallum, Matthias Schartner, Kamil Teke, Vienna VLBI and Satellite Software (VieVS) for Geodesy and Astrometry, Publications of the Astronomical Society of the Pacific, Vol. 130(986), 044503, 2018.
https://iopscience.iop.org/article/10.1088/1538-3873/aaa22b
¶ Get VieVS-VLBI
Informations on how to getting started with VieVS-VLBI can be found in the following chapters and here.
¶ Download VieVS
Since VieVS is written in Matlab, you need a recent Matlab installation (R2016b or later). VieVS is tested on Windows and Linux.
The most recent version of the software is available for everyone without any registration and will be continuously updated on GitHub. Download or clone the VLBI and the COMMON repository and put them to the same directory. Your folder structure should look like this: ../VieVS/COMMON/ and ../VieVS/VLBI/. After download from GitHub the folders are probably named VLBI-develop and COMMON-master, take care to change the names to match the folder structure stated before!
Download VieVS-VLBI module
Download VieVS-COMMON module
All software parts are open source. Feel free to use and modify the source code according to your needs and in accordance with the terms of the GNU General Public License v3.0. We are open for comments, bug-reports and of course questions (if they cannot be solved using the documentations).
Since these modules - more or less - only contain the programm code, it is necessary to download data files from external sources.
New download feature on the VieVS-VLBI Welcome panel!
¶ Data download button in Graphical User Interface (GUI)
- Since 2025-07-07 all data files necessary or recommended for standard processing can be downloaded with one button press directly from the Welcome panel. These are EOP files (finals, C04, JPL), mapping function files (VMF3), and non-tidal atmospheric loading files (NTAL/VIE).
- Usage: go to the Welcome panel (it appears when you start VieVS-VLBI and you can go back to it via the menu: File ➤ Welcome panel ), enter the required year or time range into the input field and press Download.
- The files are renamed and downloaded to the correct directories (those described below) automatically.
- Data from CDDIS (vgosDB, master files,...) cannot be downloaded automatically because they require an Earthdata Login.
- If you want to use VMF1, gradients, or ray-traced delays follow the respective instructions below.
¶ Download observation data
In order to perform VLBI analyses, you need to download VLBI data in the form of vgosDB or NGS files from one of the following sources:
- CDDIS data archive (Earthdata account necessary)
- BKG data archive
Make sure to save your VLBI data in year folders at ../VLBI/DATA/NGS/yyyy or ../VLBI/DATA/vgosDB/yyyy.
vgosDB files have to be compressed tar files, *.tgz or *.tar.gz!
NGS files have to be uncompressed!
¶ Download Earth Orientation parameter
Earth orientation parameter files can be downloaded from the IERS and must be stored in /VLBI/EOP/:
- EOP 20 C04, go to EOP 20 C04 (IAU2000A) - one file (1962-now), version metadata, download "eopc04_20.1962-now.txt" and store it as C04_20_1962_now.txt
- EOP 14 C04, go to EOP 14 C04 (IAU2000A) - one file (1962-now), version metadata, download "eopc04_14_IAU2000.62-now.txt" and store it as C04_14_1962_now.txt
- EOP finals, select finals.all (IAU2000) and download "finals2000A.all" and store it as finals_all_IAU2000.txt
- JPL EOP2, is available from https://eop2-external.jpl.nasa.gov/, download "latest_eop2.long" and store it as JPL_EOP2_long.txt.
You need to prepare only those EOP files which you want to use as a priori in the analysis, but you will need at least one! The C04 EOP do not include predictions, if you want to analyse very recent sessions use the finals or JPL EOP2.
¶ Download troposphere delay models
Yearly files containing informations on mapping functions (VMF1 and VMF3) can be downloaded from the VMF Data Server. The files need to be store in the respective folder VLBI/TRP/VMF1/ or VLBI/TRP/VMF3/.
Yearly files containing information on tropospheric gradients can also be downloaded from the VMF Data Server and need to be store in VLBI/TRF/GRAD.
¶ Download ray-tracing data
Ray-tracing delays can be downloaded from the VMF Data Server. The *.radiate files have to be stored in year folders in VLBI/TRP/RAYTRACING_DATA/yyyy/.
¶ Download atmosphere non-tidal loading
Yearly files of atmosphere non-tidal loading data can be downloaded from the VMF Data Server. Rename the yYYYY.apl_r files to vie_yYYYY.ntal_r and store them in /VLBI/NTSL/NTAL/VIE/.
¶ Running VieVS
Start Matlab, go to VLBI/WORK and type vievs in the command window to start the VieVS graphical user interface. Tutorials on how to analyse VLBI sessions with VieVS and how to schedule VLBI sessions with VieSched++ can be found on our Youtube Channel.
¶ General Concept of VieVS-VLBI
The VieVS-VLBI software has been written by the Research Unit Higher Geodesy at the Department of Geodesy and Geoinformation (GEO), TU Wien. It includes state of the art models that coincide with the latest International Earth Rotation Service (IERS) conventions. It is written in Matlab (version 8.4-R2014b or later is required) which has the advantages of being easy to use and source code changes can be applied without much effort. Unfortunately Matlab is expensive and is not as fast as C++ or FORTRAN. Matlab is, however, widely used, hence many research facilities are already in possession of a licence. The slower speed is not a big disadvantage since today's computer hardware is fast enough for normal usage of the software.
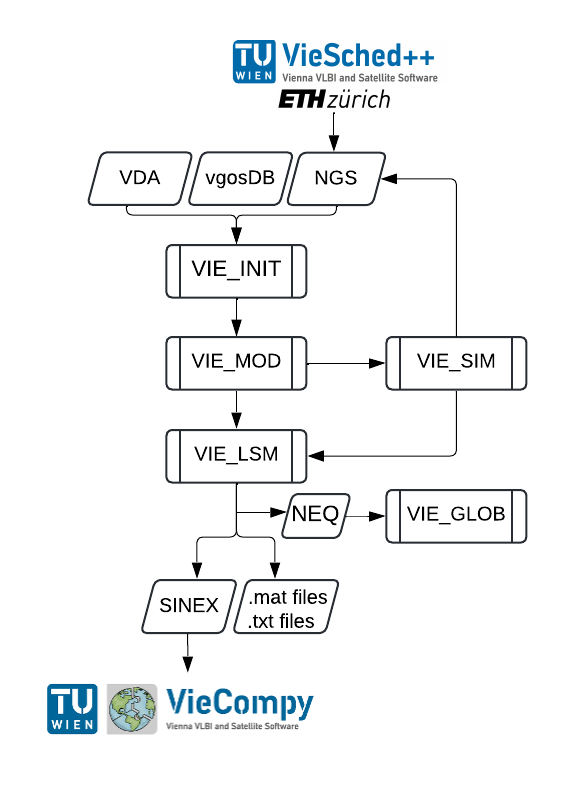
The VieVS software is structured in different parts:
-
The first part, VIE_INIT (INIT stands for initialising), is responsible for reading the data. Currently VieVS needs session files (files with the actual measurements) in NGS format, VGOSDB databases or as VDA (VGOSDA) data. Data created here is saved in the LEVEL0 folder.
-
The second part, VIE_MOD (MOD stands for modelling), calculates the theoretical delays, and its partial derivatives, models according to the IERS conventions are implemented. Data created here is saved in the LEVEL1 folder.
-
The third part, VIE_LSM (LSM stands for least squares matching), is responsible for the least squares estimation. Parameters such as EOPs, station coordinates and clock offsets etc. are estimated and saved in the LEVEL3 folder for further investigation.
Apart from the main structure in VieVS there are two other modules, namely VIE_SIM and VIE_GLOB.
-
VIE_SIM (SIM stands for simulating) creates simulated observations for an observation plan (could either be from a real session or scheduled). It combines the theoretical delay with simulated values for zenith wet delay, clocks and observation noise at each epoch, in order to create realistic observations. The output is saved as NGS format and can then be analysed with the main VieVS methods.
-
VIE_GLOB (GLOB stands for global) combines the normal equations of several sessions into a global solution in order to calculate reference frames and global parameters.
Parameters and models can be easily selected using the graphical user interface (GUI) of VieVS. The output is written to the command window of Matlab or, for some modules, in log files. The results are saved as Matlab files or text files.
¶ Fundamentals
More detailed information regarding the VLBI Fundamentals can be found here:
G. Xu (ed.), Sciences of Geodesy - II, DOI: 10.1007/978-3-642-28000-9_7, © Springer-Verlag Berlin Heidelberg 2013, by Harald Schuh and Johannes Böhm
A. Nothnagel. Elements of Geodetic and Astrometric Very Long Baseline Interferometry. TU Wien.
¶ User Guide
- Input data Important input files and more
- Processing Estimation, Simulation and Global Solution
- Output Important output files and plotting tool
- Help Possible Problems and Solutions
- YouTube Channel Tutorials and instructions
More detailed informations and up-to-date instructions can be found on our YouTube channel: https://www.youtube.com/channel/UCl2VPe7OrnznNtrh0_lwrqQ/videos
¶ Acknowledgements
We are grateful to the International VLBI Service for Geodesy and Astrometry (IVS) with all its components and contributing agencies for acquiring and providing the data. We are also grateful to the Austrian Science Fund (FWF) for supporting our work within various projects.