¶ Input files
This Chapter provides some details about different data being used in VLBI analysis and how they are used. For data used in VIE_GLOB and VIE_SIM we refer to the according wiki pages.
¶ Observation data
Basically VieVS supports the following input data formats:
- NGS files
- vgosDB files
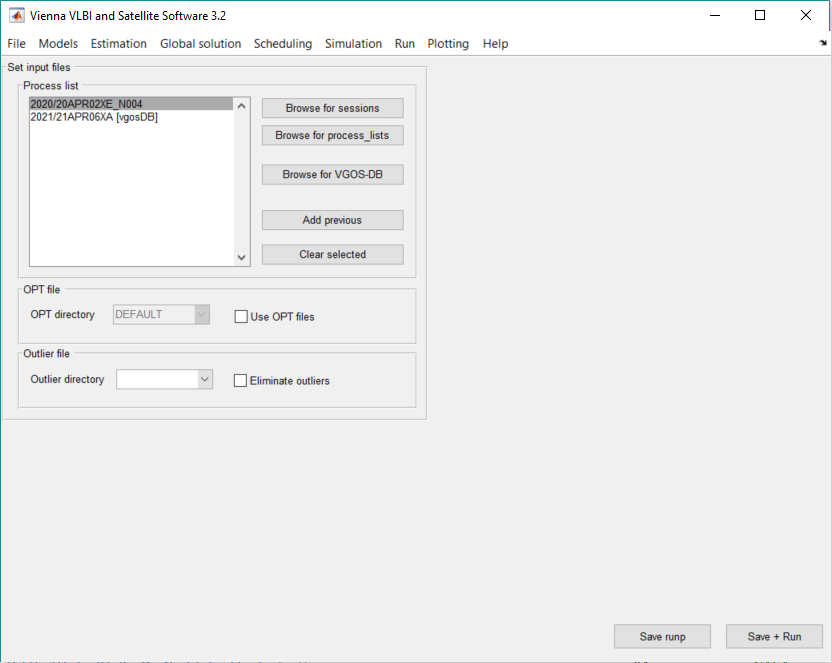
These observation files can be selected in the File - Set input files menu. To load NGS files click on Browse for sessions (see Fig. below). To load vgosDB files use the Browse for VGOS-DB button. Selected sessions show up in the process list listbox.
Furthermore, it is possible to load Process lists using the button Browse for process_lists. All selected included sessions will then show up in the according listbox.
¶ NGS files
The observations are stored in the NGS file which is the main input file for VieVS.
The NGS header consists more or less of stations and sources of the session, including their rough coordinates - x,y,z for stations, right ascension and declination for sources. The mounting type of the telescope is given as well.
The NGS data cards are the main part, all observation information are stored in here.
A full description of the NGS files can be found at http://lacerta.gsfc.nasa.gov/mk5/help/dbngs_format.txt
¶ vgosDB files
vgosDB is a format and database to store and exchange data obtained from geodetic VLBI observations. This embeds station specific data (e.g. cable calibration data, feed rotation data, meteorological data,..) and data related to the VLBI observable (e.g. group delay observations of X and S band and ionospheric slant path data). The vgos database is not a single file like the ngs file, but rather a file system with several folders. A very small number of parameters besides header information is stored in a single file. Very often just one parameter is stored in one file. The files are netCDF files, which are binaries and which are well known in the scientific community to store data and for their fast accessibility.
From September 30, 2017 vgosDB will the sole data format for any type of exchange and long term storage. The data is available on CDDIS (https://cddis.nasa.gov/archive/vlbi/ivsdata/vgosdb/). Many institutions, including GSFC, reprocess all of the IVS sessions from scratch, starting with the initial Mark3 database. This results in different editing and ambiguity resolution depending on the institution. For example, GroupDelayFull_iIVS_bX.nc in the /ObsEdit/ folder stores the X-band group delay observations processed by IVS, where “i” stands for institution.
VieVS is ready for vgosDB and is able to read the required data from the vgos database for VLBI analysis.
With the so-called VieVS vgosDB Analyzer, it is possible to view and plot the content of the vgosDB NetCDF files. Load the VieVS vgosDB Analyzer with right click on session in the list of loaded sessions and click on Analyze NetCDF file.
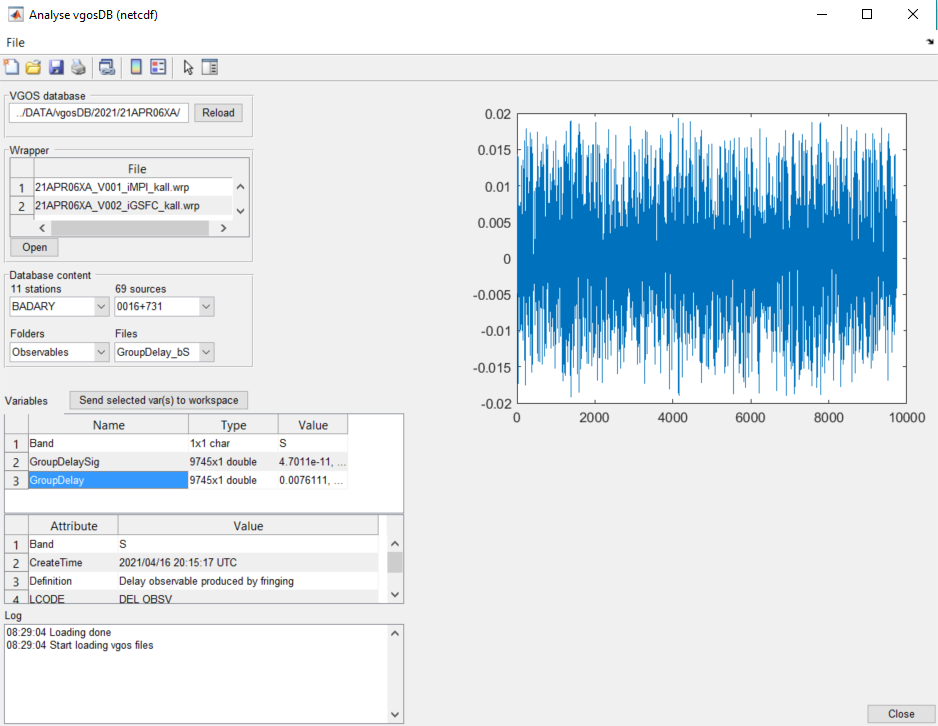
The Database content is structered by station folder and by other folders. Once you have selected a folder you can select a file in the Files dropdown menu. If you have selected a file the list of variables (parameters) stored in this file are displayed in the table of the variables. The table shows you information about the Name, Type and Value of the parameter. If you want to plot the data of a parameter, simply click on the desired parameter.
VgosDB from before 2001 do not yield the same results as NGS files right away, because there is a difference in the setting of observation quality codes/flags. If you want to process VLBI data from before 2001 use the NGS files!
Select Institute
Some of the file in vgosDB refer to the institution provider. This is the case for all files of the ObsEdit folder which represents "final" data which is ambiguity corrected. To process this data VieVS needs to know which institution should be selected because there might be various institution providers. By default IVS is selected for institution (which corresponds to the official Mark4 database). If you want to process data from another institution you can create a file in the WORK folder called vgosdb_input_settings.txt and add a line with institution: <name of desired institution>. eg. institution: GSFC.
Select Frequency Band
VgosDB offers the possibility to process different types of delays. Currently VieVS supports four different types:
- 'GroupDelayFull_bX' (final X-band group delay with ambiguity correction, corresponds to the delay in the NGS file)
- 'GroupDelayFull_bS’ (final S-band group delay with ambiguity correction)
- 'GroupDelay_bX' (X-band group delay without ambiguity correction)
- 'GroupDelay_bS' (S-band group delay without ambiguity correction)
By default 'GroupDelayFull_bX' is selected for VieVS processing. If you want to select a different observable you can simply type a line in the vgosdb_input_settings.txt file with frequencyband: <observation> e.g. frequencyband: GroupDelay_bX
Used vgosDb files in VieVS
Currently the following vgosDb files are used in VieVS:
- Head.nc
- sourcelist
- CrossReference/ObsCrossRef.nc
- CrossReference/SourceCrossRef.nc
- CrossReference/StationCrossRef.nc
- ObsEdit/GroupDelayFull_bX.nc
- ObsEdit/Edit.nc
- Observables/GroupDelay_bX.nc
- ObsDerived/Cal_SlantPathIonoGroup_bX.nc
- Scan/TimeUTC.nc
- <Station>/TimeUTC.nc
- <Station>/Met.nc
- <Station>/Cal_Cable.nc
¶ Process lists
The process list is a .mat file, which contains a list of sessions to be processed (multiple sessions can be selected). The file process_list in /WORK/ is loaded by vie batch and the sessions written in that file are processed. User defined process lists (e.g. CONT campaigns, Intensives in 2010,...) can be loaded and saved in the interface of VieVS.
File - Parameter files - Save process_list as saves the selected sessions from the listbox in File - Set input files to a process list.
This process list can be loaded in File - Set input files by selecting Browse for process_lists. All the containing sessions should appear in the listbox of File - Set input files. A function for automatically generating process lists is mk_list.
¶ mk_list
The function mk_list is a very useful tool that helps the user to select certain sessions with specified attributes (e.g. all IVS-R1 sessions from 2012 where Wettzell contributed). It can be accessed by typing

in the command window (make sure that the Current Folder in Matlab is set to the WORK directory and that VieVS has been started before, but it does not need to be opened). s1, s2, etc. are strings containing the parameters to be set, process_list is the list of sessions and sess contains the session names. To make the process list available in the VieVS GUI, save it in the WORK/PROCESSLIST directory:

mk_list.m requires that the master files of all affected years are available in the directory DATA/MASTER and that the specified sessions exist in the DATA/NGS directory.
Parameters that can be set (you also find this information in the header of the MATLAB function; can be shown in the command window by typing 'help mk_list'):
- use VGOSDB or NGS files: process_list=mk_list('VGOSDB',…) (default) or process_list=mk_list('NGS',…)
- include only a specific type of session: process_list=mk_list('all',…). Possible:
- all: use all sessions
- R1: only R1 sessions
- R4: only R4 sessions
- EURO: only sessions of the European VLBI network (EUR)
- AUA: only sessions of the AUSTRAL VLBI network (AUA)
- I1: only INT1 (XU) sessions
- Q1: only INT2 (XK) and INT3 (XK) sessions
- ...
- include only sessions from specific years: process_list=mk_list(…,'YEARS',yrs), where yrs is an array with the years you want to include
- include only a specific station: process_list=mk_list(…,'REQSTAT',sta), where sta is the two-letter ns-code of the station
- include only intensive sessions: process_list=mk_list(…,'ONLYINT')
- include only non-intensive sessions: process_list=mk_list(…,'NOINT')
- include only sessions with minimum number of stations: process_list = mk_list(…,'MINSTANUM',num), where num is the desired minimum
- include all versions in your NGS directory : process_list=mk_list('…,'ALLVERSIONS')
- list of sessions to be excluded: process_list=mk_list(…,'EXCLUDE',excllist) where excllist is the file name of the list containing the sessions to be excluded.
Please use the following format for the exclude list:

In the following there are some examples on how to use the script:
- Create a list of all R1/R4 between 2003 and 2007: process_list=mk_list('R1','R4','YEARS',2003:2007)
- All sessions which METSAHOVI has participated in: process_list=mk_list('all','REQSTAT','Mh')
- All R1/R4 in 2009, except those listed in exclude.txt: process_list=mk_list('R1','R4','YEARS',2009,'EXCLUDE','exclude.txt')
- All CONT02 sessions, including all versions of the NGS files (in case there are more than one): process_list=mk_list('C02','ALLVERSIONS')
¶ Atmospheric loading
¶ Tidal atmosphere loading
Tidal atmosphere loading is caused by diurnal heating of the atmosphere. Three models are currently implemented in VieVS:
- Vienna group (Wijaya et al., 2013)[1]
- GSFC VLBI group (Petrov & Boy, 2004)[2]
- University of Luxembourg (GGFC) (van Dam, 2010)[3]
The tidal atmospheric loading effect can be found in the superstation file and the corresponding source folder. We refer to the given references for more detail on the implemented models.
¶ Non-tidal atmosphere loading
Non-tidal atmosphere loading is caused by pressure changes due to air mass movements. At mid-latitude stations experience a vertical crustal displacements of up to 25 mm. Two models are currently implemented in VieVS:
Files used for the non-tidal atmospheric loading effect can be found in the ATM folder. We refer to the given references for more detail on the implemented models.
¶ Hydrology loading
Hydrology loading is caused by non ocean water bodies (e.g. canopy water, soil moisture, snow etc.) which cause a load on the crust. The corrections are provided by the NASA GSFC VLBI group (Eriksson & MacMillan,2014)[4].
Files used for the hydrology loading can be found in the HYDLO folder. We refer to the given reference for more detail on the implemented models.
¶ Ocean tide loading
Ocean tide loading is caused by the redistribution of water mass due to tides. The water causes a load on the crust and therefor a deformation of up to 10 cm. 5 ocean tide loading models are implemented in VieVS:
- TPX07.2 (Egbert & Erofeeva,2002)[5]
- GOT00 (Ray, 1999)[6]
- FES2004 (Lyard et al., 2006)[7]
- EOT08a (Savcenko & Bosch, 2008)[8]
- AG06 (Andersen, 2006)[9]
The ocean tide loading effect can be found in the superstation file and the corresponding source folder. We refer to the given references for more detail on the implemented models.
¶ Ocean pole tide loading
Ocean pole tide loading is generated by the centrifugal effect of polar motion on the oceans.
The IERS Conv. 2010 recommends the ocean pole tide model of (Desai, 2002)[10] which provides the ocean pole load tide coefficients.
The ocean pole tide loading effect can be found in the superstation file and the corresponding source folder. We refer to the given reference for more detail on the implemented models.
¶ Azel Files
Azel files are text-files which are created automatically as part of the daily automatic processing. For each session one .azel file is created. It contains one line for each observation and each station. The parameters written to these files are:
- Number of scan
- Mjd of observation
- Year of observation
- Day of year of observation
- Hour, minute and second of observation
- Stationname
- Azimuth [rad]
- Elevation [rad]
- Source
- Temperature [C]
- Pressure [hPa]
On the basis of the azel-files the .trp (external tropospheric files) are created. The number of rows in the .azel file is therefore the same for the .trp file. This is important because the azel-files specifies if all observations are used (even those with a quality flag not equal 0).
¶ External ionospheric files
¶ Introduction
The ionosphere is a portion of the upper atmosphere; it is extended from about 60 km to 2000 km and has the characteristics that the particles there can be easily ionized by solar radiation resulting in a positive ion and a free electron. The ionospheric delay makes up a large fraction of observed VLBI group delays and it depends on the number of free electron (TEC) along the ray path. Usually, a correction can be applied by making simultaneous observations in both S- and X-band. However, this is not always possible. For such cases, there is the alternative of calculating the ionospheric correction from Global Navigation Satellite Systems (GNSS) TEC maps. (Please note that it is only recommended to use the GNSS corrections in case of not having observations in both S- and X-band, since the X/S ionosphere values are instantaneous direct measurements while the GNSS values suffer from low spatial and temporal resolution (Gordon, 2010).
GNSS TEC maps are representing the TEC values over the whole globe determined from GNSS observations. The routine generation of these Global Ionosphere maps (GIMs) is currently done at four analysis centers of the International GNSS Service (IGS), more details about the different techniques they use can be found in Schaer (1999); Feltens (1998); Mannucci et al. (1998) and Hernández-Pajares et al. (1999). The analysis centers transmit their products to the IGS Ionosphere Product Coordinator, who produces a weighted combined product (Hernández-Pajares et al.,2009). The accuracy of the maps is between 2 to 8 TECU. Such maps exist since 1998 and have a latitude/longitude resolution of 2.5/5.0 degrees (Tierno Ros, 2011)[11].
¶ External ionospheric file
The figure below shows how an external ionospheric file looks like. The header contains information about the creation date of the file, the VLBI-session which corresponds to the file, the type of GIM used and the coordinates of the stations participating in the session.
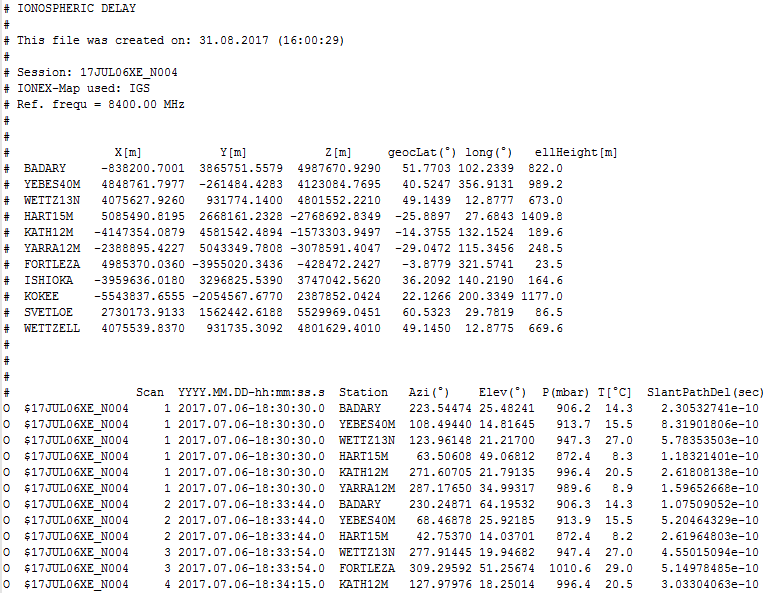
The file body is divided in columns:
- VLBI-Session that corresponds with the file
- Number of scan
- Date and time of the observation in YYY.MM.DD-hh:mm:ss.s
- VLBI-station observing
- Azimut [deg] of the observation
- Elevation angle [deg] of the observation
- Atmospheric pressure at surface [mbars]
- Temperature
- Ionospheric slant path delay [s]
¶ How to create an external ionospheric file
In order to create an external ionospheric file you should follow these instructions:
(Please note that before creating it, VIE_INIT and VIE_MOD should have been executed for the sessions for which you want to create the external files)
- Go to Models - Ionosphere and delect From ion file. Here you have not only the possibility to use an external ionospheric file but also to create one by clicking the -> Create button.
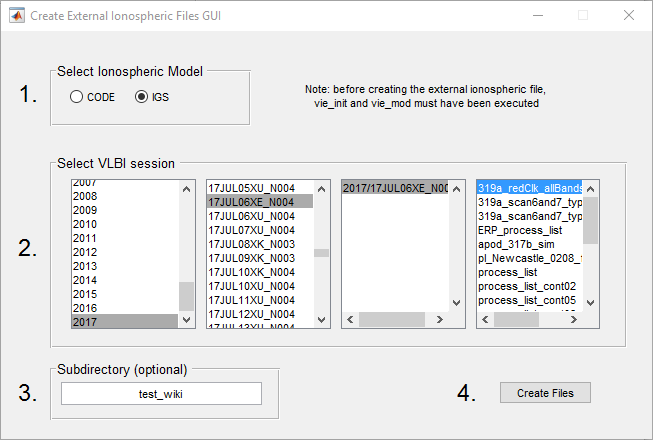
- A new GUI should open (see figure below).
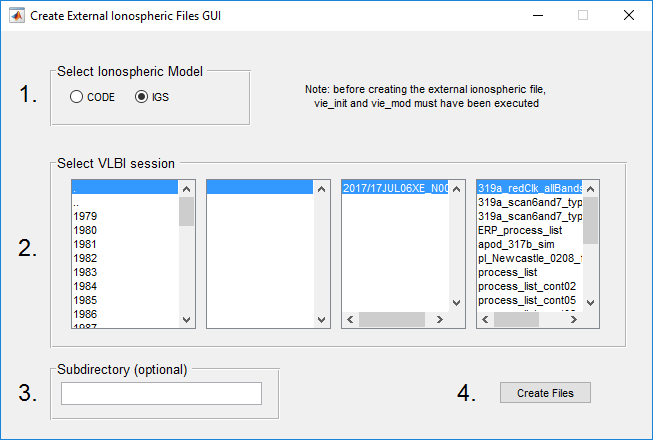 Here you can specify which ionospheric map you want to use (CODE or IGS), for which sessions you want to create the external ionospheric file and optionally the name of the directory where the external file will be saved (default is VIEVS/ION/FILES, specification of sub-directories possible). In the Figure you can see an example of how the GUI looks after you selected the parameters. You can also select multiple sessions stored in process lists. For now, the only possibility to loaf VSO files (per default located at /DATA/VSO/) is via a process list. The very left panel only lists NGS files.
Here you can specify which ionospheric map you want to use (CODE or IGS), for which sessions you want to create the external ionospheric file and optionally the name of the directory where the external file will be saved (default is VIEVS/ION/FILES, specification of sub-directories possible). In the Figure you can see an example of how the GUI looks after you selected the parameters. You can also select multiple sessions stored in process lists. For now, the only possibility to loaf VSO files (per default located at /DATA/VSO/) is via a process list. The very left panel only lists NGS files.
- Click on the button Create files.
- Now the creation of the external file starts. The following steps are carried necessary:
- Definition of the reference frequency (default = 8400.00 MHz for standard X band observations). Please note, that the effective frequency has to be entered here which calculates as weighted combination of the reference frequencies of all individual channels within the frequency band. This option also provides the possibility e.g. to derive ion. corrections for L-band observations of GNSS satellites, etc.
- Loading the antenna structure of the session from the /DATA/LEVEL1/ directory. If multiple structures were found, one has to be selected in the Command Window. Note: To generate the antenna structure the session has to be processed with VIE_MOD before!
- Loading AZEL file. If no AZEL file for this session was found at /OUT/AZEL/, a new AZEL file is created automatically.
- The CODE/IGS (according to your selection) ionospheric maps will be automatically downloaded from the corresponding CODE/IGS server (depending on the session 1 or 2 maps are needed), if it doesn't already exist.
- In case the file has to uncompressed, the program stops and asks you to manually do manually uncompress it with the software of your choice (TEC maps are located at /ION/MAPS/IGS/yyyy/). You can delete the compressed file.
- Continue by entering "y" in the CW.
- Finally, the ionospheric delays are calculated and saved in an /ION/FILES/<sub-dir> file.
¶ Ephemerides
The ephemerides contain the positions of the Earth, the Sun, the Earth's Moon the the solar system's planets. In VieVS, the planetary and lunar ephemerides DE405, DE421 and DE430 (Folkner et al., 2008)[12] can be used. Therefore, the files jpl_405.mat, jpl_421.mat and jpl_430.mat must be available in the VieVS/EPHEM/ directory. These files contain the Chebychev series coefficients that are distributed by the Jet Propulsion Laboratory (JPL) via plain-text (ASCII) files (ftp://ssd.jpl.nasa.gov/pub/eph/planets/ascii/de421). The GUI can be found in Parameter - Ephemerides with the default use of JPL 421.
However, the effect of using the different ephemerides is marginal in normal geodetic VLBI. In the processing, the function load_eph.m calculates the JPL ephemerides for VieVS, following the JPL guidelines and the idea of OCCAM 6.2 by O. Titov. The respective note on the Command Window is "reading_jpl_421_ephemerides". Output is the structure array VieVS/EPHEM/jpl_421_sesname.mat, containing the barycentric coordinates and velocities for each observation epoch. Units are and . In addition, the GM for the planets is given in . As the calculation for each observing epoch can be time consuming, the software searches for an available ephem-file by looking up the name of the session. If a file is found and the time epochs agree (if, in a second run, some observations are left out, e.g. because they were marked as outliers, the time epochs changed and the ephem-file is newly created), the old file is loaded and a repeated calculation of the planetary positions is omitted. This is documented with "load existing ephemerides ..." in the Command Window.
¶ Terrestrial reference frames
The superstation file is a .mat file containing all static station-dependent data, e.g. TRF (of different TRS realizations), loading data, eccentricities, and general antenna information. The Table below provides a summary of all realizations/models which are included by default.
The table below depicts the default input files for creating a superstation file. These files have to be located in the /TRF/data/ diurectory in the VieVS-VLBI root (as provided in the VieVS distribution). The superstation file is updated from time to time on our public VieVS server in order to account for new stations, etc.
| Category | Type | Needed files | Comments | Mandatory |
|---|---|---|---|---|
| General info | Station codes, station names, domes number, CDP, commets | ns-codes.txt | Download from https://cddis.nasa.gov/archive/vlbi/ivscontrol/ns-codes.txt. Be aware that this file might have been updated for VieVS! | yes |
| Mount type, axis offsets, diameter, thermal expansion model parameters | antenna-info.txt | Download from http://vlbi.geod.uni-bonn.de/Analysis/Thermal/antenna-info.txt. Be aware that this file might have been updated for VieVS! | yes | |
| Eccentricities of station coordinates | ECCDAT.ecc | Download from https://ivscc.gsfc.nasa.gov/IVS_AC/apriori/ECCDAT_v2019Dec19.ecc | no | |
| TRF | ITRF2005 | ITRF2005_VLBI.SSC.txt | no | |
| ITRF2008 | ITRF2008_VLBI.SSC.txt | no | ||
| VTRF2008 | VTRF2008.dat | no | ||
| VieRF2013 | VieTRF13.txt | no | ||
| ITRF2014 | ITRF2014-IVS-TRF.SNX, ITRF2014-psd-vlbi.dat | no | ||
| DTRF2014 | DTRF2014_VLBI.snx | no | ||
| VTRF2014 | VTRF2014_final.snx | no | ||
| IVS TRF 2014d | IVS_TRF2014b.SSC.txt | no | ||
| vievsTRF | vievsTrf.txt | no | ||
| User defined TRF | *.txt | TRF file defined by the user (for more information see section User defined input data) | no | |
| Tidal atmosphere loading | Vandam model | s12_cm_noib_vandam.dat (station data), s1_s2_def_cm.dat (grid data) | If there is no entry for a specific station the corrections are calculated from the grid data | no |
| GSFC model | s12_cm_noib_gsfc.dat (station data), aplo_s1_s2_noib_1.0x1.0deg.nc (grid data) | If there is no entry for a specific station the corrections are calculated from the grid data | no | |
| Vienna model | s1_s2_s3_cm_noib_vlbi.dat (station data), s1_s2_s3_cm_noib_grid.dat (grid data) | If there is no entry for a specific station the corrections are calculated from the grid data | no | |
| User defined atmospheric loading | *.dat | Enables to add user defined models (for more information see section User defined input data) | no | |
| Ocean tide loading | FES2004 model | ocean_loading_FES2004.TXT | Corrections can be obtained from http://holt.oso.chalmers.se/loading/ | no |
| GOT00 | ocean_loading_GOT00.TXT | Corrections can be obtained from http://holt.oso.chalmers.se/loading/ | no | |
| EOT08a model | ocean_loading_EOT08a.TXT | Corrections can be obtained from http://holt.oso.chalmers.se/loading/ | no | |
| TPXO72 model | ocean_loading_TPXO72.TXT | Corrections can be obtained from http://holt.oso.chalmers.se/loading/ | no | |
| AG06 model | ocean_loading_AG06.TXT | Corrections can be obtained from http://holt.oso.chalmers.se/loading/ | no | |
| User defined model | *.TXT | Add user defined model (for more information see section User defined input data) | no | |
| Ocean pole tide loading | Desay model | opoleloadcoefcmcor.txt | no | |
| User defined model | *.txt | Add user defined model (for more information see section User defined input data) | no |
¶ Description of main input files
- ECCDAT.ecc: Provides station eccentricities. Resource: https://ivscc.gsfc.nasa.gov/IVS_AC/apriori/ECCDAT_v2019Dec19.ecc. Check for updates!
- The eccentricity data is provided in 2 coorinate systems in this file (XYZ and NEU)
- The ecc.-correction is applied in vie_mod (Variable: antenna.c_ecc)
- Eccentricities provided in the NEU system are converted to XYZ (TRF coord.) in vie_mod (sub-routine: corr_ant.m)
- The eccentricity data is provided in 2 coorinate systems in this file (XYZ and NEU)
- ns-codes.txt: List of stations. Resource: https://cddis.nasa.gov/archive/vlbi/ivscontrol/ns-codes.txt. Station list for the creation of the superstation file. Contains:
- Two letter code for stations
- Station names (8 char)
- DOMES number
- CDP
- comments
- antenna-info.txt: Provides antenna information for the thermal deformation modelling.
- Resource: http://vlbi.geod.uni-bonn.de/Analysis/Thermal/antenna-info.txt
- Contained information:
- dimensions
- reference pressure and temperature
- dimensions of antenna elements for thermal expansion modelling
- axis offsets
¶ Create a superstation file
Time-dependent correction and coefficients of periodic time dependencies are stored in the superstation file which can be found in VieVS/TRF/superstation.mat. Files used for the superstation file are stored in VieVS/TRF/data/.
Superstation files can be create by using a dedicated tool in VieVS with a separate GUI.
The superstation GUI consist of four panels for defining the input files for the following cathegories:
- Main and info files
- TRF files
- Data files for modeling tidal atmosphere loading
- Data files for modeling ocean loading effects
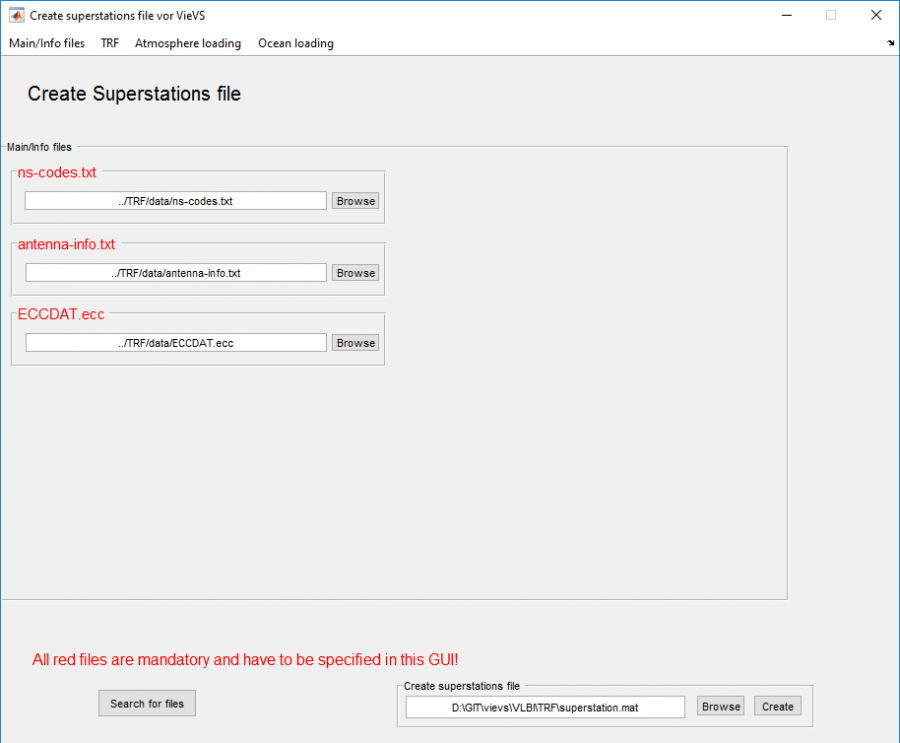
The locations of all input files have to be defined in the according edit fields. Mandatory input files are marked by red text, optional input files are indicated by black letters. The program provides a convenient "search for files" function (by pressing the Search for files button on the bottom of the GUI) which searches the default directory (.../VLBI/TRF/data/) for all available input files. Furthermore, the location and name of the new superstation file can be defined (default: /VLBI/TRF/superstation.mat). The sections below provides step-by-step guide for how to create a new superstation file and to add a new station.
¶ How to create a new superstation file
It becomes necessary to recreate the superstation file, for example, if new stations occur in a VLBI session, if models are updated, or if station characteristics changed.
- Open the superstation GUI from the VieVS main GUI
- Open the Models menu in the VieVS GUI
- Press the "Create file" button in the TRF panel.
¶ How to add a new station
If a station is not included in the superstation file then it has to be added to the text file VieVS/TRF/data/vievsTrf.txt:
- Start VieVS and load the vgosDB which includes the new station.
- Right-click on the new entry in the process list window and choose “Analyse netCDF file”.
- Select “Apriori” in Folders and “Station” in Files, mark AprioriStationList and AprioriStationXYZ and click Send selected var(s) to workspace. Go to workspace and display the coordinates of the new station in the command window by writing:
fprintf('%13.4f %13.4f %13.4f\n', AprioriStationXYZ(:,idx))
(idx stands for the index at which the new station can be found.)
- Open VLBI\TRF\data\vievsTrf.txt in a text editor.
- Add the coordinates for the new station from the Matlab command window.
- Check if TRF\data\ns-codes.txt is updated at https://cddis.nasa.gov/archive/vlbi/ivscontrol/ns-codes.txt. If so, download the newest version. Otherwise add the new antenna on your own.
- Go in the GUI to Models – Reference frames – TRF and press Create file.
- Click in the new Superstation GUI on Search for files and put a path in the lower right corner where the new superstation file should be stored.
- Click on Create.
- Have a look at the Command Window, message 4.1 shows stations which have NO OCEAN TIDE LOADING like the new station.
- Go to: http://holt.oso.chalmers.se/loading/ and get the ocean loading parameters for the new station with the coordinates provided in the Command Window.
- It might take several minutes or longer. Open the .txt file in VIEVS\WORK\OTL_email_TPXO72.txt.
- Copy the block for the new station to TRF\data\ocean_loading_TPXO72.txt.
- Click on Create.
- Process the session with the newly created superstation file.
¶ Datum definition
If station coordinates are estimated, some conditions need to be applied in order to avoid singularity - e.g. No net translation (NNT) and No net rotation (NNR). If a station has bad a priori coordinates (or after an earthquake, when coordinates are wrong), this antenna should be removed from the NNT/NNR(/NNS) condition. The rest of the paragraph gives instructions on how to exclude a station from the given conditions. If an official TRF (i.e. all but vievsTrf) is chosen in Models - Reference frames and a station is found there (coordinates exist for an appropriate break), this station is taken as datum station. If the station does not exist or has no appropriate break (i.e. backup coordinates are taken from vievsTrf), the station is excluded from NNT/NNR.
If vievsTrf is chosen as a priori reference frame (and only then), the ones and zeros in the vievsTrf-textfile indicate if a station is treated as datum station.
¶ User defined input data
TRF, tidal ocean loading, ocean pole tide loading and tidal atmosphere loading can be added by user to the superstation file. Each file has to be specified in the proper panel. The required data formats are described below.
¶ User defined TRF
User can introduced an additional TRF via a text file in the format shown in the Fig. below:

Comment lines start with '%', data lines start with a station name, followed by x, y and z coordinates and the velocities in x, y and z direction. The three last columns are epoch, start- and end-break (this specifies the time for which the coordinates and velocities are valid). Each column has to be separated by at least one blank; the columns don't have to be aligned with each other.
¶ User defined tidal ocean loading
The structure can be used for ocean loading and has to consist of:
| ivsname | load |
|---|---|
| 1x8 char | 6x(ntides) double |
where coefficient order:
| load |
|---|
| Radial-cosine |
| East-West-cosine |
| North-South-cosine |
| Radial-sine |
| East-West-sine |
| North-South-sine |
Usually, ntides = 11 as follows: M, S, N, K, K, O, P, Q, Mf, Mm, Ssa.
¶ User defined tidal atmosphere loading
The user defined atmosphere loading file should have the same format as the 'original' files given by the corresponding models (see Fig. below). A data line starts with an eight-character station name. The required 12 values (in the same order as ocean loading for S and then S) must start from position (column) 35 (more blank is allowed).

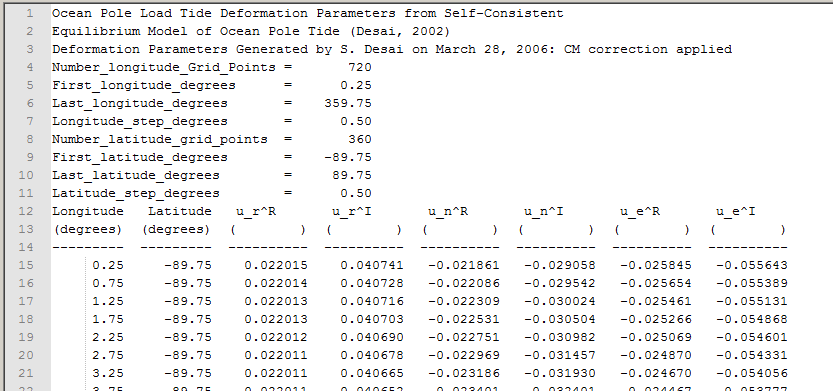
¶ User defined ocean pole tide loading
The user defined ocean pole tide loading file should have the same format as the 'original' file. The file provides all values on a longitude/latitude grid. A screenshot of this structure is shown in below:
¶ Celestial reference frames
Similar to the superstation file, there is also one file containing all static information about sources (i.e. name representations and catalog positions). The .mat file can be found in VieVS/CRF/supersource.mat. The most complete list of sources can be found in the ASCII file VieVS/CRF/create/neededFiles/vievsCrf.txt. There, the user can also add new/own sources.
¶ Create supersource file
To create a supersource file, go to Models - Reference frames and click on Create file in the Celestial reference frame panel. In the appearing GUI set the paths to all required files (all but user crf are required) and save the supersource file.
VieVS automatically reads the default file (supersource.mat in VieVS/CRF/) at the start of VieVS. If you want to load another one, select Chose file in Models - Reference frames in the CRF panel.
¶ Add a new source to the supersource file
If a source is not included in the supersource file then it has to be added to the text file VieVS/CRF/data/vievsCrf.txt. The necessary information comes from the vgosDB file, for instance. Add the new source in the same format as the other sources, that is:
IVS source name (8 characters), right accession (hh mm ss.ssss), declination (+/-dd mm as.ssss), epoch (yyyy.y), source file where the source coordinates are taken from (if it is from a NGS file please write the name of the session here), number to define if coordinates are taken in NNR condition if vievsCRF selected or not (1 or 0).
ATTENTION! If the declination of the source is negative and has only a single digit it is written as follows in the NGS file: "- 4". This can not be read properly in VieVS, please remove the space or fill it with a zero, e.g.: "-4" or "-04".
Besides that the function \VLBI\CODE\MISC\check_sources_in_vgosDB_file.m can be used to read out the source position from the vgosDB:
- Go to the workspace and type:
check_sources_in_vgosDB_file('<*sessionname*>','supersource.mat');
This function provides the missing source directly in the requested format for vievsCrf.txt, and the user is asked directly whether the source should be added to the txt file. Select Y if it should be directly saved in vievsCrf.txt, otherwise open \VLBI\CRF\data\vievsCrf.txt in a text editor and copy the line from the workspace to the end of the source table and save it.
As a next step the new source must be added to the supersource.mat file in order to be available in VieVS:
- Go to the GUI again to Models - Reference frames - Celestial Reference Frame, click on Create file.
- Make sure that the paths of the required files are correct and that vievsCrf.txt is selected as BACKUP.
- Specify the directory and name for the supersource file and click Create.
- Go to Models - Reference frames - Celestial Reference Frame and select the new supersource file.
ATTENTION! In the NGS header IVS source names are used but the ICRF catalogues, e.g. ICRF1, ICRF2,... contain only the IERS names! In most cases these are identical but sometimes they differ. You may check the translation table (CRF/create/supersource/neededFiles/IVS_SrcNamesTable.txt) provided by the Goddard VLBI group to find the IERS name. The checking is done automatically while creating the supersource file. In case an IVS name is missing in this table or there is no IERS name given for the particular source, a dummy IERS name is created in a form VIE_xxxx and stored in the supersource file.
Thus, the new supersource.mat file is generated and replaces the previous version, now containing also the newly added source.
¶ Input parameters
¶ Models
In the tab Models, variable options concerning the calculation of the theoretical delay and its partial derivatives can be chosen. When no changes are done here, the processing runs with the default options. The corresponding source code is found in VIE_MOD, with a short introduction of the processing chain given in the next section.
A flowchart of VIE_MOD is shown below.
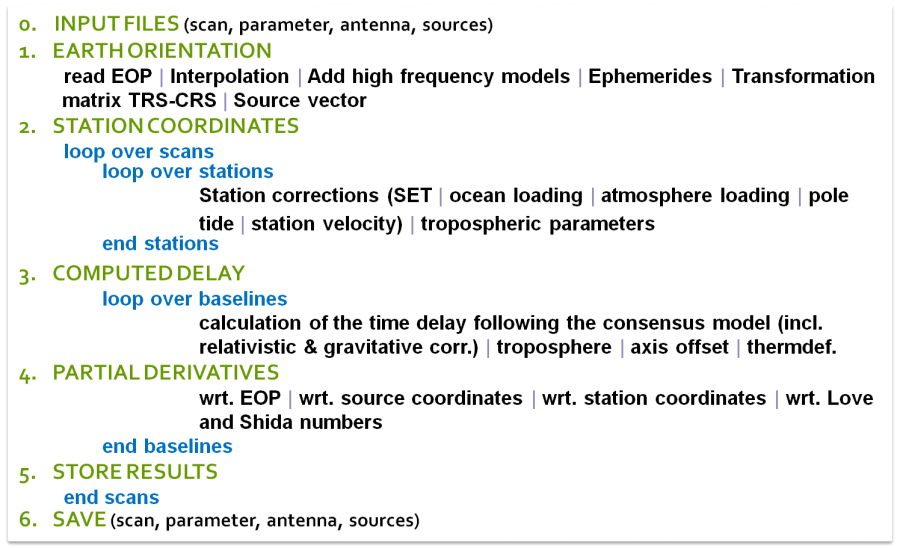
- 0. INPUT FILES: As input, VIE_MOD uses the previously prepared files of LEVEL0, namely the structures sessionname_scan, _parameter, _antenna and _sources.
- 1. EARTH ORIENTATION: For each observation epoch, the actual Earth orientation is calculated and the transformation matrix between the terrestrial and the celestial system is prepared. The source coordinates, originally given as angles in right ascension and declination in the celestial frame, are converted to barycentric direction vectors.
- 2. STATION COORDINATES: At this point, a loop over all scans, respectively observing epochs, is started. In a second loop over all participating antennas, the coordinates for each station are calculated for the time of observation.
- 3. COMPUTED DELAY: The theoretical delay is calculated for each observation, following the Consensus model (IERS Conventions 2010; Petit & Luzum, 2010)[13]. Since VieVS 3.0 VIE_MOD is able to compute theoretical delays for near field observations to satellites according to the observation equations by Klioner (1991)[14]. The formulism implements an iterative solution of the light-time equation in the GCRF including gravitational corrections.
- 4. PARTIAL DERIVATIVES: The derivatives of the observable (time delay) after the target parameters is calculated in VIE_MOD. This is the main input to VIE_LSM. For a detailed formalism please have a look at the source code directly.
- 5. STORE RESULTS: The computed values are stored in the respective structure arrays.
- 6. SAVE: Result of VIE_MOD are the modified .mat structures, which are stored in the LEVEL1 directory.
¶ Reference frames
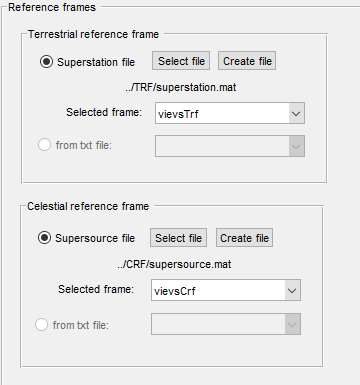
Both terrestrial and celestial reference frames can be selected in Models - Reference frames.
By default a superstation file is loaded which contains different reference frames, such as ITRF2005, ITRF2008, VTRF2008 and a special VieVS-TRF. Those can be chosen in the popupmenu. The path and name of the selected superstation file is indicated in the GUI below the Select file button
A manual TRF file can be loaded by clicking on from .txt file. The text file must be put in /VieVS/TRF/. The format is the same as for loading a manual TRF in the superstation file. If you're using completely new stations, you might need to deselect antenna corrections. However, it is recommended to use the superstation file to include a user-own TRF. The used coordinates are stored in the antenna structure in LEVEL0 and LEVEL1. However, the antenna coordinates in the //antenna// structure are the catalog coordinates. In order to get the precise station coordinate for the time of observation various station models are applied in VIE_MOD on the catalog coordinates.
For the CRF, a co-called supersource file is used. From this, the chosen catalog is taken and the source coordinates in terms of right ascension and declination are stored. In VIE_MOD, the celestial angles are converted to a barycentric direction vector .
This source vector is stored in the scan structure.
scan(isc).space.source
¶ Ephemerides
The ephemerides contain the positions of the Earth, the Sun, the Earth's Moon the the solar system's planets. In VieVS, the planetary and lunar ephemerides DE405, DE421 and DE430 (Folkner et al., 2008)[12:1] can be used. Therefore, the files jpl_405.mat, jpl_421.mat and jpl_430.mat must be available in the VieVS/EPHEM/ directory. These files contain the Chebychev series coefficients that are distributed by the Jet Propulsion Laboratory (JPL) via plain-text (ASCII) files (ftp://ssd.jpl.nasa.gov/pub/eph/planets/ascii/de421). The GUI can be found in Parameter - Ephemerides with the default use of JPL 421.
However, the effect of using the different ephemerides is marginal in normal geodetic VLBI. In the processing, the function load_eph.m calculates the JPL ephemerides for VieVS, following the JPL guidelines and the idea of OCCAM 6.2 by O. Titov. The respective note on the Command Window is "reading_jpl_421_ephemerides". Output is the structure array VieVS/EPHEM/jpl_421_sesname.mat containing the barycentric coordinates and velocities for each observation epoch. Units are and . In addition, the GM for the planets is given in . As the calculation for each observing epoch can be time consuming, the software searches for an available ephem-file by looking up the name of the session. If a file is found and the time epochs agree (if, in a second run, some observations are left out, e.g. because they were marked as outliers, the time epochs changed and the ephem-file is newly created), the old file is loaded and a repeated calculation of the planetary positions is omitted. This is documented with "load existing ephemerides ..." in the Command Window.
¶ Troposphere
In Models - Troposphere the user can select either between several models used for calculating the a priori tropospheric delay for the VLBI observations, or deduce the information directly from ray-traced delays.
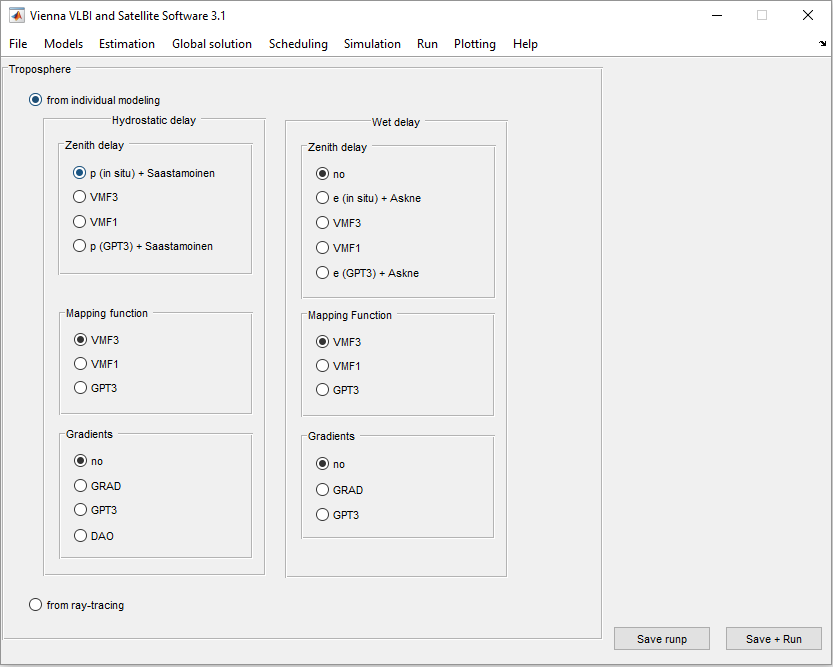
Zenith hydrostatic delay :
- ''p (in situ) + Saastamoinen'': measuring at the site and inserting it into the formula by Saastamoinen (1972) (default setting)
- ''VMF3'': using ray-traced from the Vienna Mapping Function 3 (Landskron and Böhm, 2018)
- ''VMF1'': using ray-traced from the Vienna Mapping Function 1 (Böhm et al., 2006)
- ''p (GPT3) + Saastamoinen'': inserting from the empirical troposphere model Global Pressure and Temperature 3 (Landskron and Böhm, 2018) into the formula by Saastamoinen (1972)
The formula by Saastamoinen (1972) reads
Zenith wet delay :
- ''no'': no a priori zenith wet delay (default setting)
- ''e (in situ) + Askne'': measuring at the site and inserting it into the formula by Askne and Nordius (1987)
- ''VMF3'': using ray-traced from the Vienna Mapping Function 3 (Landskron and Böhm, 2018)
- ''VMF1'': using ray-traced from the Vienna Mapping Function 1 (Böhm et al., 2006)
- ''e (GPT3) + Askne'': inserting from the empirical troposphere model Global Pressure and Temperature 3 (Landskron and Böhm, 2018) into the formula by Askne and Nordius (1987)
Hydrostatic mapping function and wet mapping function ::
- ''VMF3'': applying the discrete Vienna Mapping Function 3 (Landskron and Böhm, 2018) (default setting)
- ''VMF1'': applying the discrete Vienna Mapping Function 1 (Böhm et al., 2006)
- ''GPT3'': applying the empirical troposphere model Global Pressure and Temperature 3 (Landskron and Böhm, 2018)
Hydrostatic gradients and wet gradients for consideration of azimuthal asymmetry the following models are available:
- ''no'': not applying of a priori gradients (default setting)
- ''GRAD'': applying the discrete a priori gradients GRAD (Landskron and Böhm., 2018)
- ''GPT3'': applying empirical a priori gradients from Global Pressure and Temperature 3 (Landskron and Böhm, 2018)
- ''DAO'': applying empirical a priori gradients from GSFC (MacMillan, 1995), which are only available for the hydrostatic part
The resulting a priori tropospheric delay at a certain elevation and azimuth is finally calculated through
where
The corresponding values for each station are stored in the LEVEL1 scan structure.
scan(isc).stat(stnum).mfw
scan(isc).stat(stnum).zdry [m]
scan(isc).stat(stnum).aprgrd [m]
scan(isc).stat(stnum).trop [sec]
Following the Consensus model (Petit & Luzum, 2010)[13:1] the theoretical delay is corrected for the
influence of the troposphere by adding the geometric part of the troposphere () and by adding the troposphere propagation delay for each station.
Alternatively, tropospheric delays can directly be introduced from ray-tracing by hitting the radio button ''from ray-tracing''. For this purpose, ray-traced delays for the full history of geodetic VLBI are stored in TRP/RAYTRACING_DATA
¶ Ionosphere
In VieVS the information about the ionospheric delay contained in the observation file (NGS, VSO, or vgosDB) is used by default, but there is also the possibility of using external corrections, in this case, derived from GNSS Total Electron Content (TEC) maps.
To use the external corrections you should go to Models - Ionosphere and select external file You should also select, in the adjacent box, the folder where your external ionospheric corrections file is.
In order to get more information about the external ionospheric file (how it looks like, how it is created...) we refer to the according chapter.
Please note that it is only recommended to use the GNSS corrections in case of not having observations in both S- and X-band, since the X/S ionosphere values are instantaneous direct measurements while the GNSS values suffer from low spatial and temporal resolution (Gordon, 2010).
By default, in VieVS the ionospheric correction delion as given in the observation file is applied on the observed delay already in LEVEL0, when the data is read in. Alternatively, when an external file is used, delion = 0 and the observed delay is corrected in LEVEL1. Then, the ionospheric correction is also saved for each station.
The data can be found in the scan structure.
scan(isc).obs(iobs).delion - ionosphere from the observation file, LEVEL0; =0, if no iono. delays provided in the observation file
scan(isc).obs(iobs).ionDelext (optional) - LEVEL1
scan(isc).stat(stnum).iono (optional) - LEVEL1
¶ Station models
The provision of ITRF happens via tables of station coordinates, modeled linearly, which means there are coordinates calculated for a certain reference epoch and the corresponding velocity for each station. These coordinates are calculated for regularized positions, in order to remove high frequency variations. The variations , predominantly of geophysical origin, are accounted for with conventional models, as described in chapter 7 of the IERS Conventions (Petit & Luzum, 2010)[13:2]. The instantaneous station position at epoch composes to:
All models that can be selected in the GUI (see screenchot below), except the correction for antenna thermal deformation, are calculated for each observation epoch and are applied directly to the antenna coordinates prior to the delay calculation. Additionally, antenna eccentricities are applied. The purpose of this approach is to get the most accurate coordinates of the observing antennas at the epochs of observation! The corrected station position in the TRF as well as in the GCRF is
stored in the scan structure.
scan(isc).stat(ist).x - corrected station position in TRS [x,y,z], [m]
scan(isc).stat(ist).xcrs - corrected station position in GCRS [x,y,z], [m]
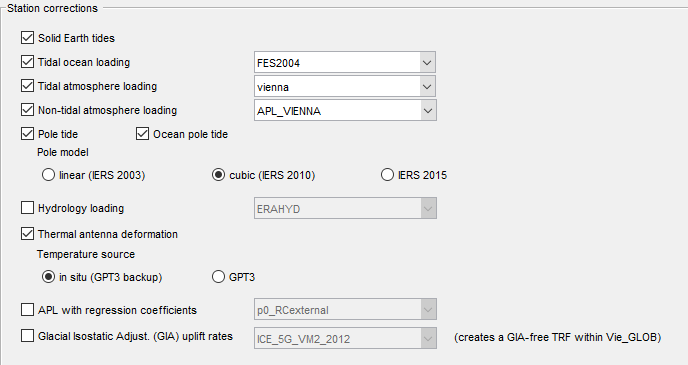
In general, all required input data for the different station corrections which are select-able in the GUI are stored in the superstation file.
¶ EOP
The Earth orientation must be calculated in order to relate the terrestrial co-rotating system where the stations are given in with the space-fixed celestial system of the radio sources. In VieVS, the procedure described in chapter 5 of the IERS Conventions (Petit & Luzum, 2010)[13:3] is implemented to calculate the transformation matrix for each observation epoch. Hereby, the "CIO-based" transformation concept following the Non-Rotating Origin (NRO) is chosen. Consequently, the Precession/Nutation is accounted for with the coordinates of the CIP in the GCRS, represented by the parameters and .
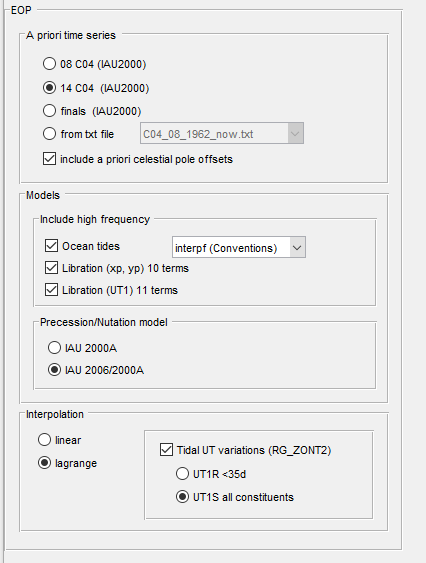
For the processing, an up-to-date time series of the Earth orientation parameters (EOP) is necessary in the directory VIEVS/EOP/ As default, the C04 14 series (in accordance with ITRF2014 station coordinates) provided by the IERS is used. However, as this series is updated with some latency, for recent sessions one might need to use the slightly less accurate finals EOP series. In this case, the program will crash with the error:
time of observation is out of your EOP time limits
please update ../EOP/C04_14_1962_now.txt !!!
appearing in the command window, see problems section.
When calculating the Earth orientation, leap seconds must be taken into account. The agreed time epochs when a new leap second was inserted are saved in the routine tai_utc.m (part of VIE_MOD). In order to be sure that you do not forget to update this file when a new leap second is inserted, there is an automatic warning when you process a session after the given date. What to do if the warning
+++ please check for new leap second TAI-UTC tai_utc.m +++
appears, is written in the problems section.
EOP values are interpolated between the data points of the selected (IERS) a priori time series (usually providing daily values) for the actual observation epochs. There is the option to select between lagrange (polynomial) and linear interpolation and the option to consider tidal UT variation with different constituents in the interpolation approach. Basically modeled UT variations are subtracted before, and re-added after the actual interpolation, to smooth the time series used for the interpolation.
Various high frequency models can be selected to add the according a priori correction on top of the selected a priori EOP time series.
¶ Observation restrictions
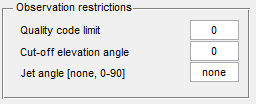
By default all observation above horizon ( elevation) and a quality code of 0 (best) are used in the analysis. However, the user can modify these two settings in Models - Observation restrictions. If all observations (not only those of best quality) should be used, type a number into the textfield Quality code limit. The input cut-off elevation angle is in unit of degree. Additionally the user can decide to exclude observations with certain jet angles. If no observations should be exculded, type none into the corresponding checkbox.
¶ Antenna deformation
The computed delay is corrected for errors due to antenna thermal deformation. The corresponding code can be found in the subroutine /VIE_MOD/thermdef.m, follwoing (Skurikhina, 2001)[15]; (Haas, 1999)[16]; (|Nothnagel, 2009)[17]. The parameters for each station are stored in the superstation file, as read in from the antenna-info.txt file.
¶ Axis offsets
The additional delay due to the axis offset is calculated in the subroutine // /VIE_MOD_Vxx/axis_
stat.m//. The axis offset parameter for each antenna needs to be stored in the superstation file.
¶ Source Structure
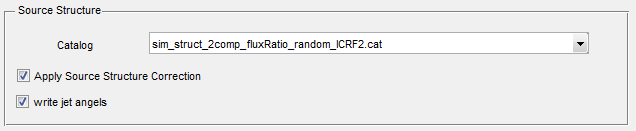
First select the source structure catalog you would like to use. Catalogs are saved in VieVS/-
CRF/SOURCE_STRUCTURE_CAT/. Then you can decide if you want to apply the correction
and/or calculate and write the jet angles to VieVS/DATA/JETANG/.
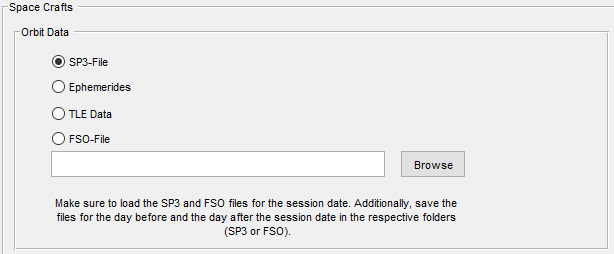
¶ Space Crafts
For processing satellite observation data a priori orbit information is required. The orbit information is used in VIE_MOD to calculate computed delays for observations of satellites.
Four different orbit file formats are supported for modelling delays:
- SP3 files
- TRF ephemeris files
- TLE files
- FSO files
The orbit files can be selected in the GUI (Select file by clicking on the Browse for orbit file button). VieVS automatically distinguishes between the file formats.
¶ References
Wijaya, D.D., Böhm J., Karbon M., Krasna H., and Schuh H. (2013). Atmospheric pressure loading. Chapter 4 in Atmospheric effetcs in space geodesy. Boehm, J. and Schuh, H. (eds), Springer-Verlag Berlin Heidelberg. ↩︎ ↩︎
Petrov, L. and Boy, J.P. (2004). Study of the atmospheric pressure loading signal in very long baseline interferometry observations. J. Geophys. Res., 109. ↩︎ ↩︎
van Dam, T. (2010). Ncep derived 6-hourly, global surface displacements at 2.5 x 2.5 degree spacing. Data set at http://geophy.uni.lu/ncep-loading.html. ↩︎
Eriksson D., and D.S. MacMillan (2014). Continental hydrology loading observed by VLBI measurements. J Geod 88. pp. 675–690. doi10.1007/s00190-014-0713-0. ↩︎
Egbert, G.D. and Erofeeva, S.Y. (2002). Efficient inverse modeling of barotropic ocean tides. J. Atmos. Oceanic Technol., 19, 183-204. ↩︎
Ray, R.D. (1999). A global ocean tide model From TOPEX/Poseidon altimetry: GOT99.2. NASA Technical Memorandum TM-209478, 58. ↩︎
Lyard, F., Lefevre, F., Letellier, T., Francis, O. (2006). Modelling the global ocean tides: modern insights from FES2004. Ocean Dynamics, 56, 5-6 ↩︎
Savcenko, R. and Bosch, W. (2008). Eot08a - empirical ocean tide model from multi-mission satellite altimetry. Deutsches Geodätisches Forschungsinstitut (DGFI), München, report No. 81. ↩︎
Andersen, O.B. (2006). www.spacecenter.dk/data/global-ocean-tide-model-1/. ↩︎
Desai, S.D. (2002). Observing the pole tide with satellite altimetry. J. Geophys. Res., 107. ↩︎
Tierno Ros, C., J. Böhm, H. Schuh (2011). Use of GNSS-derived TEC maps for VLBI observations. In: Proceedings of the 20th Meeting of the European VLBI group for Geodesy and Astronomy. Schriftenreihe 22, Institut für Geodäsie und Geoinformation, Universität Bonn. ↩︎
Petit, G. and Luzum, B., eds. (2010). IERS Conventions 2010. Frankfurt am Main: Verlag des Bundesamts für Kartographie und Geodäsie, IERS Technical Note No. 36. ↩︎ ↩︎ ↩︎ ↩︎
Klioner, S.A. (1991). General relativistic model of VLBI observables. In W.E. Carter, ed., Proc. AGU Chapman Conf. on Geodetic VLBI: Monitoring Global Change, 188-202, American Geophysical Union, Washington D.C, NOAA Technical Report NOS 137 NGS 49. ↩︎
Skurikhina, E. (2001). On Computation of Antenna Thermal Deformation in VLBI Data Processing. In D. Behrend and A. Rius, eds., 15th Workshop Meeting on European VLBI for Geodesy and Astrometry, 124. ↩︎
Haas, R. (1999). Explanatory Supplement to the Section “Antenna Deformation” of the IERS Conventions (1996). In H. Schuh, ed., DGFI Report No. 71 , 26-29. ↩︎
Nothnagel, A. (2009). Conventions on thermal expansion modelling of radio telescopes for geodetic and astrometric VLBI. J. Geod., 83, 787-792. ↩︎