¶ Function
Elevation: The observations are weighted depending on the elevation of the specific satellite. You can define your own weighting function in the text field. Usually, sin²(e) is used. Please check str2func.m for the corresponding syntax and note that ‘@(e)’ is automatically added to the string from the GUI. Do not forget points to allow element-wise operations. Note that the elevation is considered in radiants. Weighting function examples (e.g., Hadas et al. 2020):
sin(e).^2
sin(e)
% exponential
1./(1+3.5.*exp(-180.*e/pi/9))
% cosin e -type
1./sqrt(1+4.*cos(e).^8)
% implemented hardcoded function
option_0option_0 corresponds to sin(e).^2
Multipath-LC: weights are calculated from the value of the Multipath-Linear-Combination. Check this article.
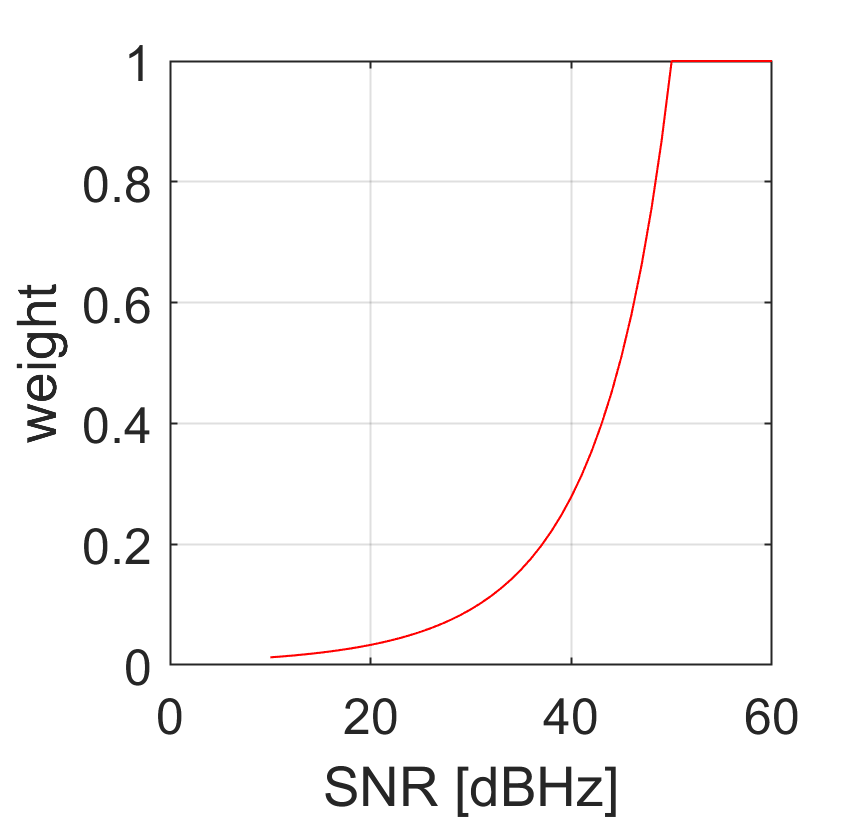
Signal strength: Weighting is based on the carrier-to-noise density (C/N0) of the measurements. When processing the IF LC, the C/N0 values of the first frequency are used. Otherwise, the mean C/N0 value of all processed frequencies is used to weight a specific satellite. This is because the C/N0 of devices such as smartphones is considerably lower at the second frequency, which would result in significant down-weighting of the second frequency. (See “frequency-specific standard deviations” for more information on down-weighting observations of specific frequencies.)
You can define your own weighting function in the text-field. Please check str2func.m for the corresponding syntax and note that ‘@(snr)’ is automatically added to the string from the GUI. Do not forget points to allow element-wise operations. Examples are:
10.^-(max([55-snr,0])./10)
10.^-(max([55-snr,0])./20)
% with some values for a and b:
a + b.*10.^(-snr/20)
% implemented hardcoded functions (check below):
option_0
option_1
option_2
% simple linear function
-0.8.*SNR+37option_1 corresponds to 10.^-(max([55-snr,0])./10)
option_2 corresponds to option_1, but instead of using 55 as fixed value, the maximum of the mean C/N0 in the current epoch is used for this factor.
Jump to Table of Content
Boresight: Weight the observations using the boresight angle, which is the angle between the receiver antenna’s pointing direction (antenna boresight) and the line of sight vector to the GNSS satellite.
None: all observations have the same weight (e.g., 1)
¶ GNSS Factors
Define a factor for the variance of the observations of each GNSS here. This could be motivated by the varying precision of the satellite orbits, for example. The default value is 1 for all GNSS. Assigning an extremely high value to a specific GNSS (e.g. 5) will result in the corresponding GNSS observation being given less weight, meaning it will have less influence on the solution. For example, setting the BeiDou factor to 2 will multiply the variance of the observations in the Kalman filter by two.
¶ Standard deviation of raw observations
Define the standard deviation in the zenith direction of the code observations and the phase observations in [m]. When processing an IF LC, this raw standard deviation is increased during the processing due to the coefficients of the LC. Furthermore, the observation weighting function maps the defined standard deviation to the actual observation.
If the ionospheric delay is estimated with an ionospheric constraint, the standard deviation of the ionospheric pseudo-observations in the zenith direction is also defined here. Furthermore, the user can decide how long the ionospheric pseudo-observations should be used and to which level their standard deviation should be increased up to this point.
Frequency-specific standard deviations: In addition to the defined standard deviation of the code and phase observation, the user can define frequency-specific standard deviations with the two provided tables. Missing values are replaced by the “regular” standard deviation of code and phase observation. Therefore, the “regular” standard deviation of code and phase observation are used during in the processing if both tables are kept empty.
Jump to Table of Content